ここでは上図に表されるように複数の物体がばねで連結されている場合の振動(連成振動)について学びます。
共に質量\( m \)の2つの物体が図の様にばね定数\( k \)と\( k' \)(プログラムではkpと表す) のばねで連結している場合、物体のつり合いの位置からの変位をそれぞれ\( x_1 \), \( x_2 \) とすると、 物体に対する運動方程式は
$$ \begin{eqnarray} m \frac{d^2 x_1}{dt^2} &= -k x_1 +k'(x_2 - x_1) \tag{1}\\ m \frac{d^2 x_2}{dt^2} &= -k x_2 -k'(x_2 - x_1) \tag{2} \end{eqnarray} $$となります。(1)式を見ると、\( x_1 \)の時間変化が\( x_2 \)に依存するため、 この振動は単振動では表せない事が分かります。 実際にシミュレーションを実行してみると2つの物体はそれぞれ複雑な運動をすることが分かると思います。 ところがちょっと見方を変えると、この運動は単振動を使って理解できるというのが、ここでのお話です。
(1)式と(2)式を辺々足し算したもの、引き算したものを考えると、
$$\begin{eqnarray} m \frac{d^2}{dt^2}(x_1 +x_2) &=& -k(x_1+x_2) \tag{3}\\ m \frac{d^2}{dt^2}(x_1-x_2) &=& -(k+2k')(x_1 - x_2) \tag{4} \end{eqnarray} $$となります。ここで新たな座標変数
$$Q_1 =\frac{1}{\sqrt{2}}(x_1+x_2),~~~ Q_2 = \frac{1}{\sqrt{2}}(-x_1+x_2) \tag{5}$$を導入すると、(3)(4)式はそれぞれ、
$$\begin{eqnarray} \frac{d^2}{dt^2}Q_1 &=& -\frac{k}{m}Q_1 \tag{6}\\ \frac{d^2}{dt^2}Q_2 &=& -\frac{k+2k'}{m}Q_2 \tag{7} \end{eqnarray} $$となります。(6)(7)式は\(Q_1\), \(Q_2\)について分離しているため、それぞれ独立した単振動になっています。 よって、直ちに解くことができて、
$$\begin{eqnarray} Q_1 = C_1 \sin{(\omega_1 t +\delta_1)},& ~~~~\omega_1 = \sqrt{\frac{k}{m}} \tag{8}\\ Q_2 = C_2 \sin{(\omega_2 t +\delta_2)},& ~~~~\omega_2 = \sqrt{\frac{k+2k'}{m}} \tag{9} \end{eqnarray} $$となります。これらを(5)式を\( x_1 \), \( x_2 \)について逆解きした式に代入すれば、それぞれの物体の運動が分かります。
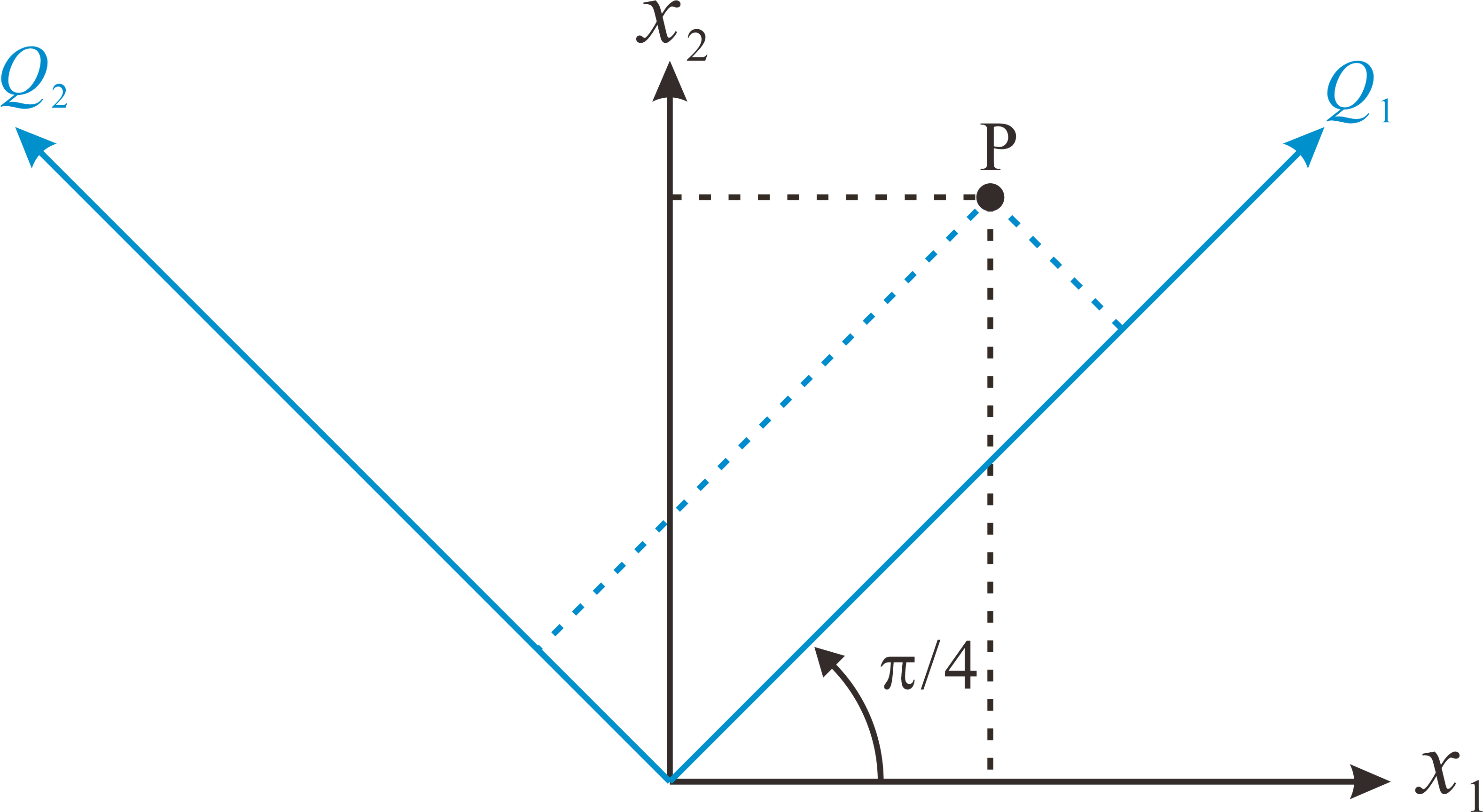
ここで、(5)式の変換について考えてみます。(5)式の変換を行列を使って書いてみると
$$ \begin{bmatrix} Q_1 \\ Q_2 \end{bmatrix} = \begin{bmatrix} \frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \\ -\frac{1}{\sqrt{2}} & \frac{1}{\sqrt{2}} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} = \begin{bmatrix} \cos{\frac{\pi}{4}} & \sin{\frac{\pi}{4}} \\ -\sin{\frac{\pi}{4}} & \cos{\frac{\pi}{4}} \end{bmatrix} \begin{bmatrix} x_1 \\ x_2 \end{bmatrix} $$となっており、次図に示したような座標変換になっていることが分かります。
座標変換することで、一見すると複雑そうな運動が簡単な単振動の問題になったわけです。
このような、連成振動を複数個の単振動に帰着させる座標を基準座標といい、その振動を基準振動といいます。 さらなる一般論については力学の専門書を参考にしていただく事にして、ここでは基準振動の考え方の要点を抑えてもらえればと思います。
参考文献:小出昭一郎 「物理学」裳華房